

Venturi Astrolab y Astrobotic han anunciado que el módulo de aterrizaje Griffin de Astrobotic transportará el rover FLIP (Flex Lunar Innovation Platform) a la Luna como parte de la misión Griffin-1. La entrega está programada para finales de 2025 y tendrá lugar en la región de Nobile, cerca del polo sur lunar.
Características técnicas del rover FLIP
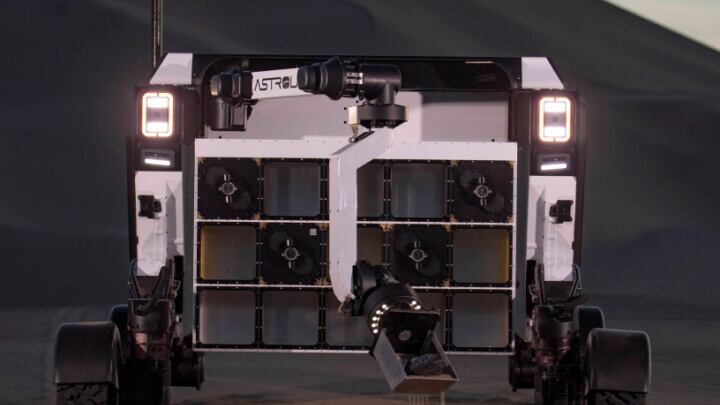
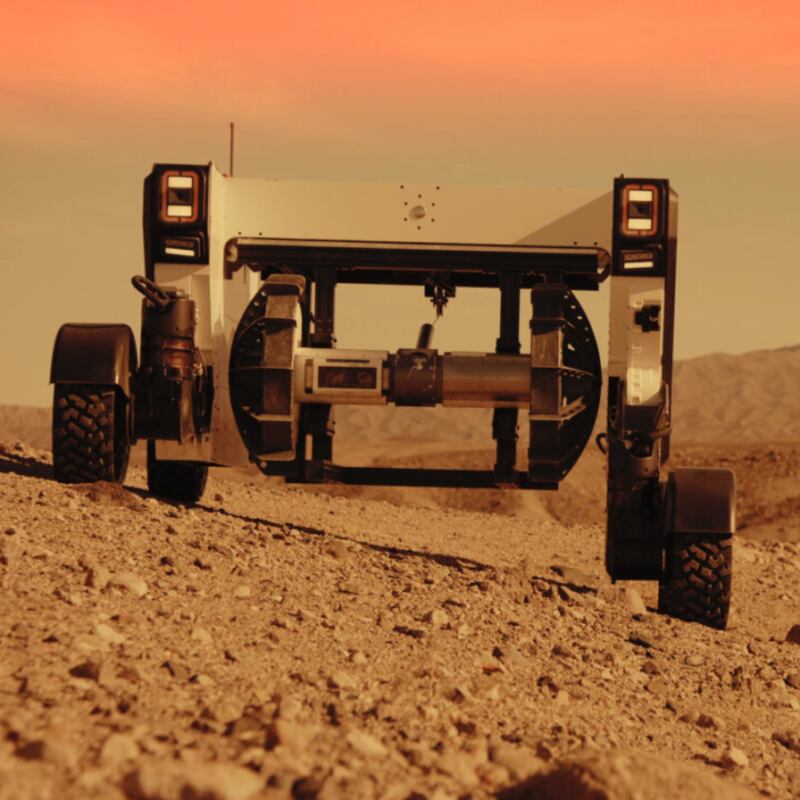
El rover FLIP tiene una masa de aproximadamente 450 kilogramos y una capacidad de carga útil de 30 kilogramos. Está diseñado para ser compatible con los módulos de aterrizaje lunares de clase media y comparte componentes clave con el rover FLEX de Astrolab. Entre sus características principales se incluyen:
- Baterías de tamaño completo desarrolladas por Venturi Space.
- Neumáticos hiperdeformables sin aire, optimizados para la superficie lunar.
- Sistemas de aviónica avanzados, que permiten la navegación autónoma y el control remoto.
- Sensores de exploración y software optimizado para operación en entornos extremos.
Objetivos de la misión Griffin-1
Tras la cancelación del proyecto Viper por parte de la NASA en julio de 2024 debido a restricciones presupuestarias, la misión Griffin-1 se reconfiguró para demostrar la capacidad del módulo Griffin al transportar una carga similar a la de Viper. Como parte de la misión, FLIP cumplirá varios objetivos:
- Evaluar tecnologías clave para mitigar los efectos del polvo lunar en vehículos y estructuras.
- Probar revestimientos protectores en componentes como el panel solar y el radiador.
- Cuantificar la acumulación de polvo en superficies y evaluar estrategias de sellado contra el polvo en los actuadores de las ruedas.
- Poner a prueba sistemas en temperaturas extremas y terrenos accidentados característicos del polo sur lunar.

El futuro de la exploración lunar con Astrolab
En 2023, Astrolab anunció un acuerdo con SpaceX para transportar el rover FLEX a la Luna a partir de diciembre de 2026 mediante el sistema de lanzamiento y aterrizaje Starship. La plataforma FLIP servirá para madurar tecnologías esenciales y recopilar datos científicos críticos antes de esta misión comercial.
John Thornton, CEO de Astrobotic, destacó la importancia de esta colaboración: “Astrolab comparte nuestra visión de hacer que la ciencia lunar, la exploración y la actividad comercial sean accesibles. Con FLIP a bordo de Griffin-1, estamos allanando el camino para el futuro de la humanidad en la Luna”.
El senador de Pensilvania, John Fetterman, resaltó el compromiso de la industria espacial estadounidense: “Cuando surgen desafíos, redoblamos esfuerzos. Con el rover FLIP en esta misión, demostramos al mundo que seguimos avanzando”.
Astrolab y Astrobotic continúan expandiendo sus capacidades para ofrecer soluciones de movilidad lunar eficientes y confiables, posicionándose como actores clave en la exploración y colonización futuras de la Luna.

Historia de los rovers lunares
A lo largo de la historia de la exploración lunar, varios vehículos han recorrido la superficie del satélite terrestre, desempeñando un papel crucial en la investigación científica y la movilidad de los astronautas:
- Lunojod 1 y 2 (URSS, 1970 y 1973): Fueron los primeros rovers teledirigidos en operar en la Luna, enviados por la Unión Soviética. El Lunojod 1 recorrió 10,5 km en 322 días de operación, mientras que el Lunojod 2 alcanzó los 37 km.
- Rover Lunar de Apolo (EE.UU., 1971-1972): Utilizados en las misiones Apolo 15, 16 y 17, estos vehículos permitieron a los astronautas explorar un mayor radio de acción. El más exitoso recorrió 35,9 km en la misión Apolo 17.
- Yutu y Yutu-2 (China, 2013 y 2019): China desplegó estos rovers como parte de las misiones Chang’e 3 y Chang’e 4. Yutu-2 sigue operando en la cara oculta de la Luna, enviando datos científicos sobre la composición del regolito lunar.
- Viper (NASA, cancelado en 2024): Estaba planeado para buscar hielo en el polo sur lunar, pero fue cancelado debido a problemas presupuestarios.